Things used in this project
Hardware components
 ×1
×1
| CAN-Based Distance Sensor |
×1
Software apps and online services

Story
WHO ARE WE
WHAT IS OUR PROJECT
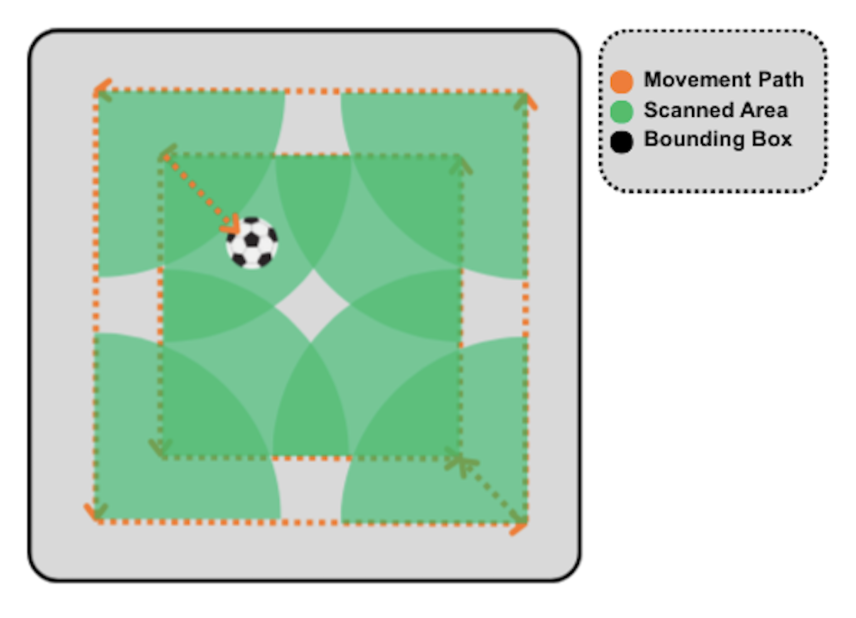
Our Soccerbot runs autonomously inside a large rectangular box, operates without any prior knowledge of the position of the ball, locates it, and kicks it. It will scan for the ball spirally, starting from the edges, using a wall-following algorithm, and does a 90-de…
Things used in this project
Hardware components
×1
| CAN-Based Distance Sensor |
×1
Software apps and online services
Story
WHO ARE WE
WHAT IS OUR PROJECT
Our Soccerbot runs autonomously inside a large rectangular box, operates without any prior knowledge of the position of the ball, locates it, and kicks it. It will scan for the ball spirally, starting from the edges, using a wall-following algorithm, and does a 90-degree scan every corner. It will move inwards from the wall to the next spiral.
WHY WE DID THIS
We wanted to have a robot running autonomously inside the stadium, which requires very strong logic and data acquisition using the sensors. It is also challenging to incorporate moving the robot in space with the self-balancing Segbot mode, as it requires data prioritization and tuning. We are also very interested in developing an algorithm that the robot has a guaranteed chance of finding the ball and kick it, while preventing any chances of hitting the wall.
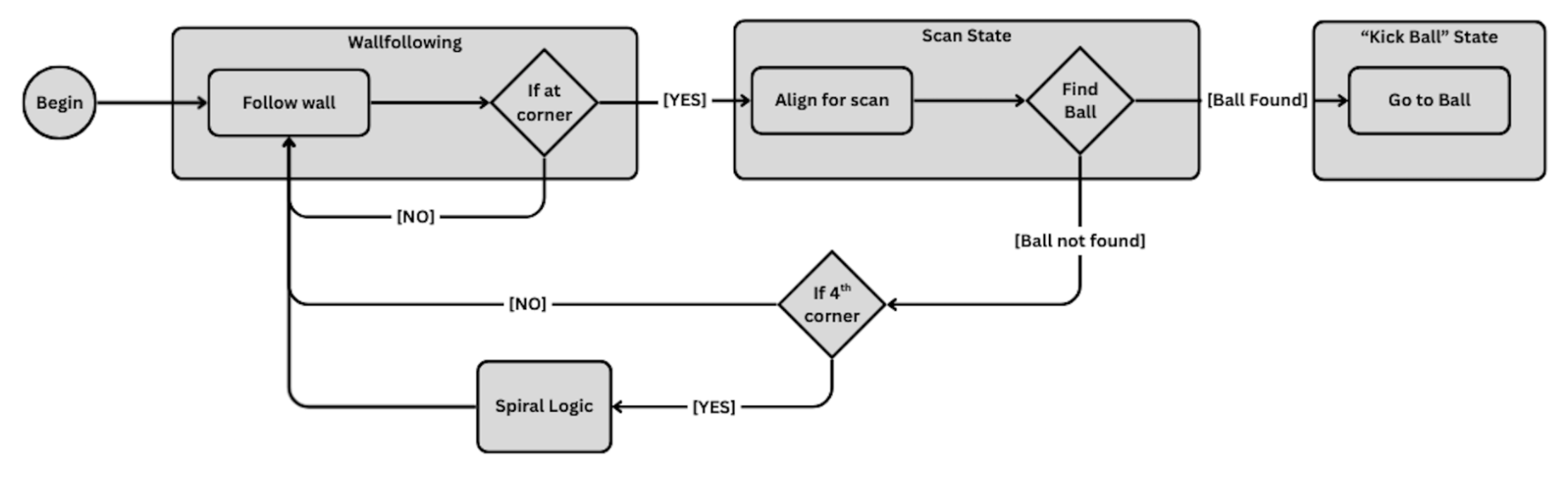
HOW IT WORKS
While using the segbot mode, we used the right-wall following algorithm to loop over the walls. When the robot approaches the front-wall in the right-wall following configuration, prior to turning, it will first rotate 180 degrees backwards, and do a 90-degree scan to see if there is a ball near the corner, and also orient itself for the next right-wall following. If there is nothing detected in the scans from the first 4 corners, it will increase its threshold values used for right-wall following to begin scanning in the next spiral.
A Limitation of our project is that the ball is assumed to be placed somewhere in the center, since there are blind spots at places around the midpoints near the walls. If there is no ball detected inside the stadium, the soccerbot will spin around itself at the center of the stadium.
DEMONSTRATION
EXPLANATION
**Read more
Schematics